


项目简介:
在当前全球科技竞争日益激烈的背景下,开源开放已成为推动机器人技术和人工智能领域交叉融合的重要赋能技术。人形机器人,作为具身智能的最佳载体和下一代“智能终端”,正处于关键的发展突破期。然而,行业当前仍然面临“一高五难”的挑战:硬件门槛高、软件算法难、软硬解耦难、知识积累难、人才聚集难以及安全应用难。全栈开源的人形机器人项目OpenLoong应运而生,旨在推动行业发展和技术进步。
OpenLoong项目的开源内容包括:
- 开源公版硬件系统 (OpenLoong Hardware System):包含了人形机器人的头部、上肢、下肢、躯干、控制等硬件图纸、驱动等设计资料。
- 全身动力学控制系统 (OpenLoong Dynamic Control System):包括基于全身动力学控制实现的算法模型,包括算法、仿真与部署框架工具链。
- 开源数据集(OpenLoong Dataset):包含了人形机器人开展行走、抓取、作业、搬运等运动的数据集。
该系统的主要功能和技术特点:
- 硬件强对标人:公版机硬件全尺寸1.85m强对标人设计,整机43个自由度,具有五指手、头与腰,自重85Kg。
- 易操控:提供面向人形机器人的多种全身遥操控方案,可操控人形机器人完成上肢灵巧作业并完成数据实时采集用于训练技能模型。
- 易部署:提供完善全身动力学控制软件包与软件框架,通过仿真环境可以完成对人形机器人全身动力学步态控制算法的仿真。
- 可扩展:控制系统开发框架结构采用分层模块化设计,旨在提高系统的可维护性和可扩展性,系统各功能模块在逻辑和功能上具有明确的界限,为二次开发提供了更加友好的环境,使开发人员能够更轻松地对系统进行功能定制和扩展。
- 易理解:代码结构简洁,遵循针对功能进行模块封装的代码设计原则,应用总线进行模块间数据交互,减少封装冗余,有助于降低代码复杂度;算法实现采用“读取-计算-写入”的简单逻辑,提高代码的可理解性。
项目特点:
技术价值:
降低全尺寸人形机器人开发准入门槛,避免对样机研制中机器人操作系统、控制框架、伺服通讯总线、全身动力学控制算法的重复研发投入。
业务价值:
全尺寸人形机器人全栈开源项目,行业领先的设计方案与运动能力。青龙公版机强对标人、属行业领先设计。
生态价值:
建设人形机器人硬件设计行业公开、统一的技术交流平台,加速技术迭代、降低开发门槛,促进整个行业的进步,规范化人形机器人传感器、作业执行系统的设计标准。推动产业链上下游的深度融合与协同发展。
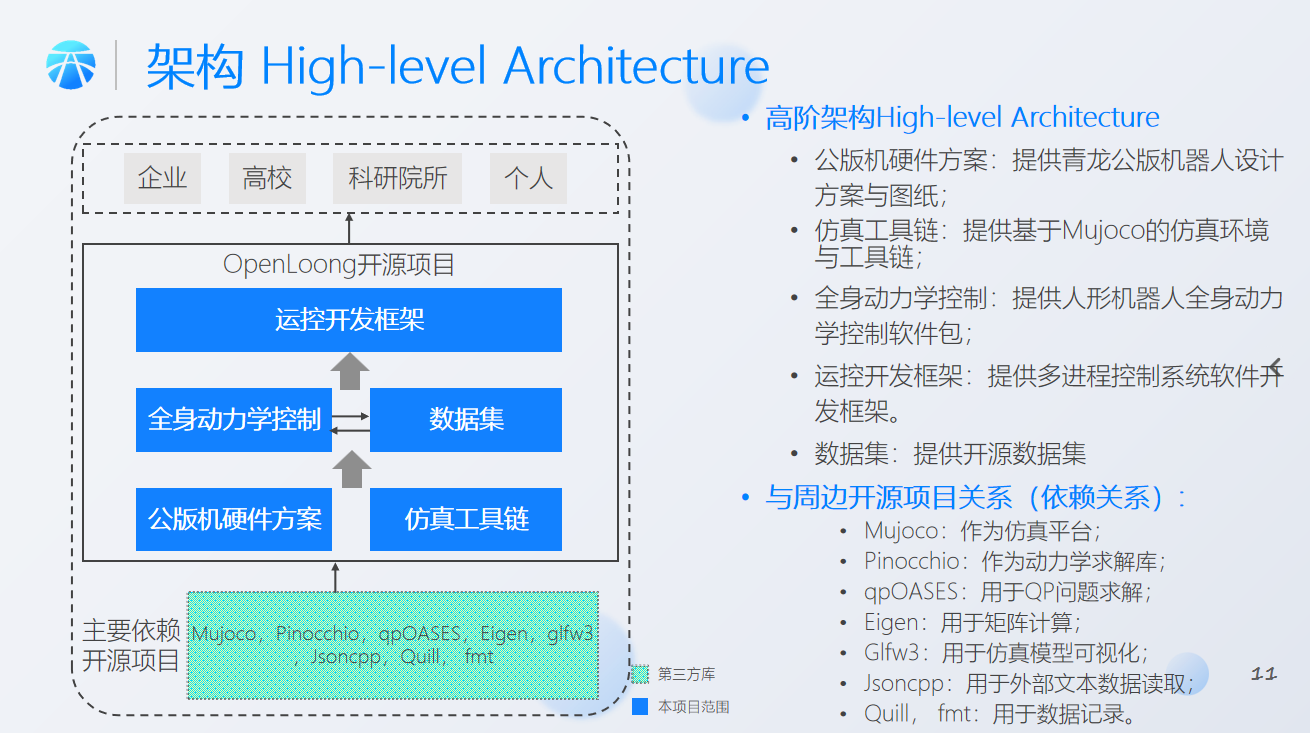
项目架构:
'/%3e%3c/g%3e%3c/svg%3e)